1. MSCA Mobility rule
To be eligible for this PhD position, applicants must not have resided or carried out their main activity (work, studies, etc.) in France (country of the recruiting beneficiary) for more than 12 months during the 36 months immediately preceding the recruitment date — unless this period was part of compulsory national service or a procedure for obtaining refugee status under the Geneva Convention.
2. Description of the Work Project
Large-aperture antennas are key technologies for communications, radar, sensing, and space exploration, offering higher resolution and sensitivity. Their development, especially for high-frequency Kaand X-band missions, faces challenges due to required apertures over 30 m. On-orbit manufacturing enables building large, lightweight antennas in space, but surface accuracy and deployment reliability remain issues. An alternative is using swarms of small satellites phased together to form a coherent antenna array. JPL research has shown this method is promising for high data-rate communications, relying on precise intra-swarm metrology. Swarm antennas are also reconfigurable, allowing one formation to serve multiple missions through coordinated maneuvers. However, maintaining formation and synchronization is complex due to coupled attitude and position dynamics. Control systems must ensure accurate timing, phase, and orientation among satellites. Tethered configurations add further complexity from structural flexibility in tethers and appendages. Precise dynamic modeling is needed to handle orbital perturbations affecting performance. Tethered systems can also generate controllable forces via electrodynamic tether currents. This concept, though studied for de-orbiting, remains unexplored for swarm control and merits further research.
3. Core activities
By leveraging skills available in the team on modeling and control of large flexible structures and
antenna technology, this project will focus on:
- Modeling and high-fidelity simulation of the coupled flexible translational/rotational dynamics of swarms of tethered satellites
- Proposing innovative attitude and orbital control algorithms that take into account all gravitational, thermal, radiation, structural flexibility and distributed control coordination and actuator saturation
- Assessing the use of the radio-frequency (RF) diagnostic of received/transmitted signal as
intra-swarm metrology system - Assessing the use of innovative orbital/attitude maneuvers with both classical and non-classical (i.e. conductive thethers) actuators for reconfiguration and de-orbiting
Research field:
- Dynamical System Modelling
- Control Theory
- Aerospace engineering
- Electrical Engineering
Required skills:
- Automatic Control
- Dynamical System Modelling
- Antenna and Signal Processing
- Numerical simulation programming (e.g., Python, Matlab, C++, …)
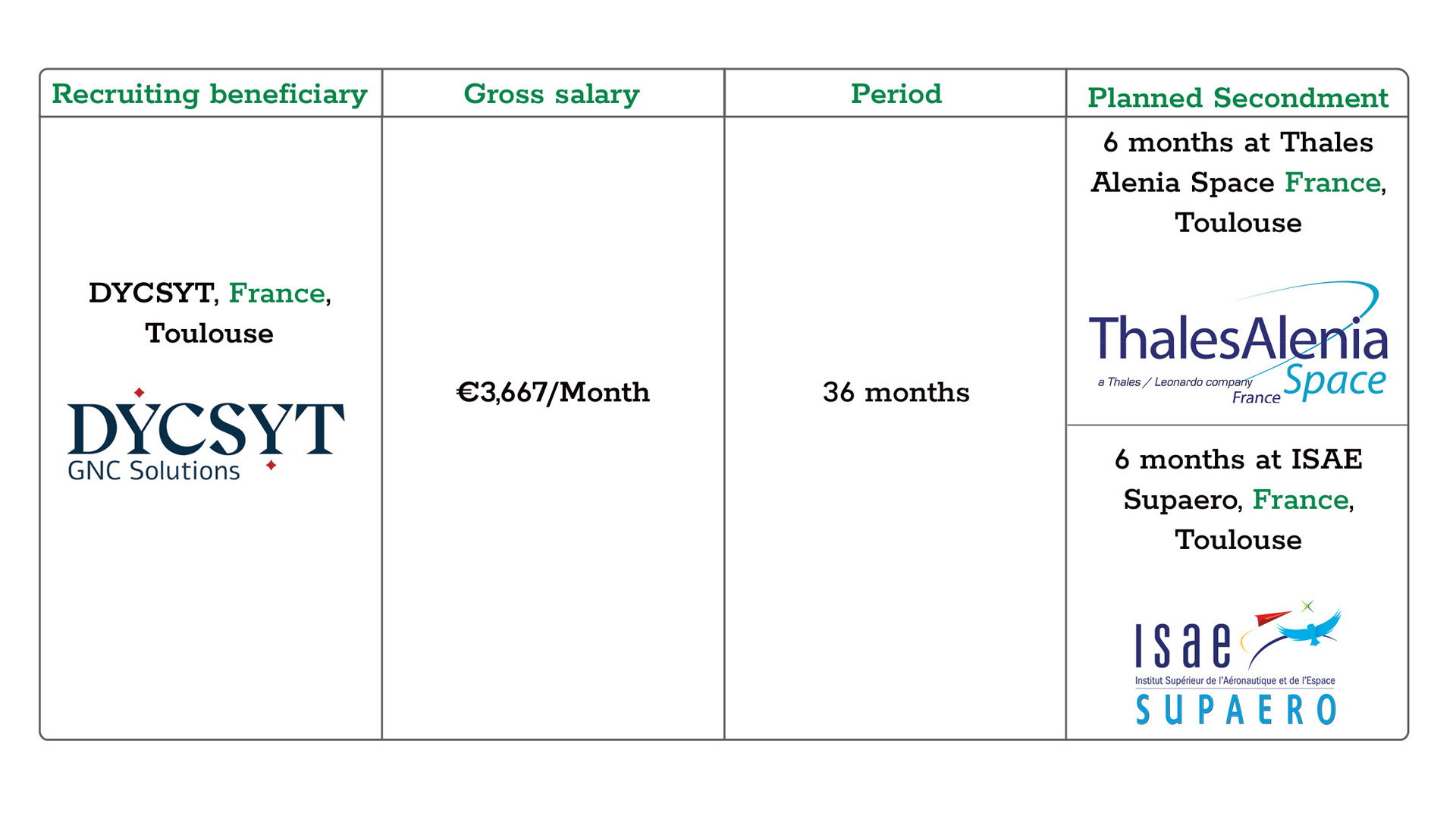
4. Recruitment and secondment plan: